NMEAについて
NMEA-0183とは、アメリカの米国海洋電子機器工業会(National Marine Electronics Association)が制定した、標準フォーマットです。
GNSS測量では、主に位置情報を交換する時に使用するフォーマットです。
NMEAフォーマットには、様々な種類の文型があり、全ての文字列には最初に”$”で始まり、各データはカンマで区切られて、データの最後には”*”とチェックサムが入っています。
今回は代表的な「GGA」「GST」「GSA」がどのような文型なのかを説明します。
<GGA:測位値情報についてのデータ>
測位時刻、位置、測位ステータス等の測位値についてのデータが記載されています。
サンプル
$GPGGA,014956.00,3247.75073570,N,13043.58508150,E,4,11,0.70,4.987,M,34.035,M,1.0,0031*4F
| サンプル例 | データ項目 | 説 明 |
|---|---|---|
| GPGGA | メッセージID | 最初の2文字(トーカーID)でどの衛星データか決定 GP:GPS GL:GLONASS GA:Galileo GQ:QZSS GN:GNSS ※GPとGNがよく使われています。 |
| 014956.00 | 時刻 | UTC(協定世界時)の時刻 |
| 3247.75073570 | 緯度 | dddmm.mmmm表記 |
| N | 南北 | 緯度方向 N:北緯 S:南緯 |
| 13043.58508150 | 経度 | dddmm.mmmm表記 |
| E | 東西 | 経度方向 E:東経 W:西経 |
| 4 | 測位ステータス | 1:単独測位 2:DGPS 4:FIX 5:Float |
| 11 | 使用衛星数 | 測位に使用した衛星数 |
| 0.70 | HDOP | 水平精度低下率 |
| 4.987 | 標高 | |
| M | 単位 | アンテナ海抜高度の単位 |
| 34.035 | ジオイド高 | |
| M | 単位 | ジオイド高の単位 |
| 1.0 | Age | 補正情報を受信してからの経過時間 |
| 0031 | 基準局ID | |
| *4F | チェックサム | 送られてきたデータが途中でおかしくなっていないかチェックする方法の1つ |
※NMEAフォーマットでは、経緯度は度分、分で表記されている為、度分秒で使用する場合は変換する必要があります。
サンプル数値を使用して「度分、分」を「度」もしくは「度分秒」に変換してみます。
「度」に変換
北緯 32度47.75073570分 → 32+(47.75073570÷60) = 32.795845595
東経 130度43.58508150分 → 130+(43.58508150÷60) = 130.726418025
「度分秒」に変換
北緯 32度47.75073570分 → 32度47分 (0.75073570×60) = 32度47分45.044142秒
東経 130度43.58508150分 → 130度43分 (0.58508150×60) = 130度43分35.104890秒
テラサット・ジャパンでは、ユーザーが現場で観測した単独測位情報(GGA)を、インターネット回線を利用して、テラサット・ジャパンのサーバーに送ってもらい、その測位情報を元に補正データを作成しています。また、そのGGAからユーザーの観測状況を予想し、サポートにも役立てています。

※インターネットが利用できない環境では、テラサット・ジャパンの補正データを受けることができません。補正データが受けられていない場合には、インターネットが利用できているかどうかを、まずご確認ください。
<GST:測位値の誤差・統計についてのデータ>
測位値の品質に関する統計数値が記載されています。
サンプル
$GNGST,062546.00,1.313,0.669,0.610,143.0,0.648,0.632,1.816*41
| サンプル例 | データ項目 | 説 明 |
|---|---|---|
| GNGST | メッセージID | 最初の2文字(トーカーID)で、どの衛星データか決定 GP:GPS GL:GLONASS GA:Galileo GQ:QZSS GN:GNSS ※GPとGNがよく使われています。 |
| 062546.00 | 測位値を算出した時刻 | UTC(協定世界時)の時刻 |
| 1.313 | 疑似距離残差のRMS値※1 | 測位ステータスがDGPSまでは疑似距離、それ以降は搬送波位相距離を使用した測位値のRMS(2乗平均平方根)値 |
| 0.669 | 誤差楕円※2の長半径の標準偏差 | 予測値を中心に測位値を1シグマ(約68%)囲むような楕円体の長半径・短半径 |
| 0.610 | 誤差楕円の短半径の標準偏差 | |
| 143.0 | 誤差楕円の長半径方向 | 真北方向からの角度 |
| 0.648 | 緯度誤差の標準偏差 | 緯度・緯度・高さ誤差における標準偏差(1シグマ) |
| 0.632 | 経度誤差の標準偏差 | |
| 1.816 | 高さ誤差の標準偏差 | |
| *41 | チェックサム | 送られてきたデータが途中でおかしくなっていないかチェックする方法の1つ |
※1RMS(Root Mean Square)は、測位値の品質を表しています。残差(測位値と予測値の差) の2乗の総和を平均し、ルートを取った値です。
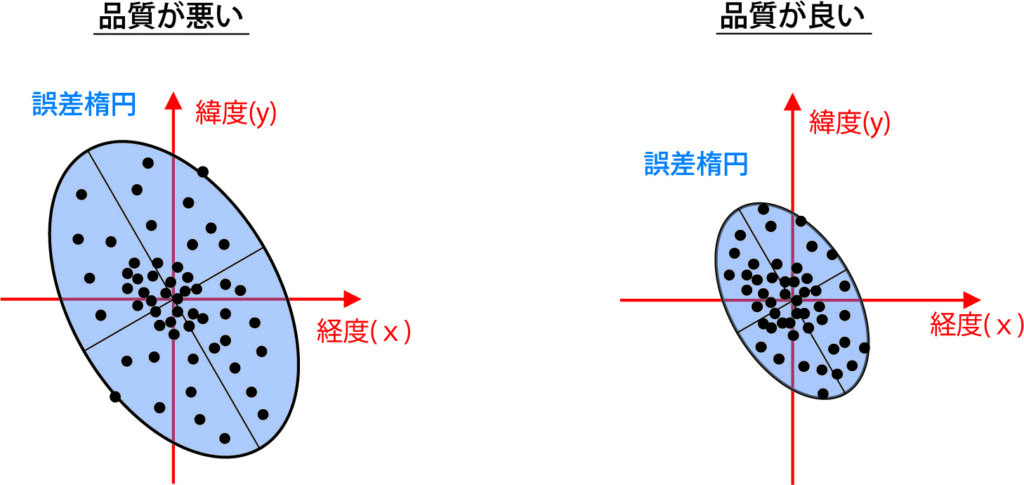
※2誤差楕円とは、予測値(x,y)を中心として、データが散らばる範囲を表示した楕円の事を言います。RTKの計算結果における水平位置の品質評価として使用され、楕円体の長軸・短軸・長軸の角度の3要素によって決定します。楕円体の面積が大きくなれば、測位値が散らばっていると言うことになるので、測位品質が良くないと言えます。逆に面積が小さいと測位値が固まっているので、測位品質が良いと言えます。
<GSA:DOP及び使用衛星についてのデータ>
受信機の動作モード・使用測位衛星番号・DOP値が記載されています。測位衛星ごとに複数のGSAに分けて出力されています。
システムIDを確認することで、どの衛星システムかを判断することができます。
サンプル
$GNGSA,A,3,26,29,12,28,32,31,25,,,,,,1.8,0.9,1.5,1*37
| サンプル例 | データ項目 | 説 明 |
|---|---|---|
| GNGSA | メッセージID | 最初の2文字(トーカーID)で、どの衛星データか決定 GP:GPS GL:GLONASS GA:Galileo GQ:QZSS GN:GNSS ※GPとGNがよく使われています。 |
| A | 2D/3Dモード選択 | M:手動(2D・3D固定) A:自動(3D・2D/3D自動切換え) |
| 3 | 測位ステータス | 1:測位不可 2:2D測位 3:3D測位 |
| 26,29,12,28, 32,,, | 衛星番号 | 測位に使用した衛星番号 |
| 1.8 | PDOP | 位置精度低下率 |
| 0.9 | HDOP | 水平精度低下率 |
| 1.5 | VDOP | 鉛直精度低下率 |
| 1 | システムID | 測位衛星システムを表記 1:GPS 2:GLONASS 3:Galileo 5:QZSS |
| *37 | チェックサム | 送られてきたデータが途中でおかしくなっていないかチェックする方法の1つ |
テラサット・ジャパンでは、実際に設置したGNSS受信機でVRSの補正データを取得し、RTKの計算をさせています。そして、そのGNSS受信機にこれまで説明したNMEAデータ等を出力させ、補正データの品質確認を行っています。